A programming kit is needed to change the program in the vex controller.
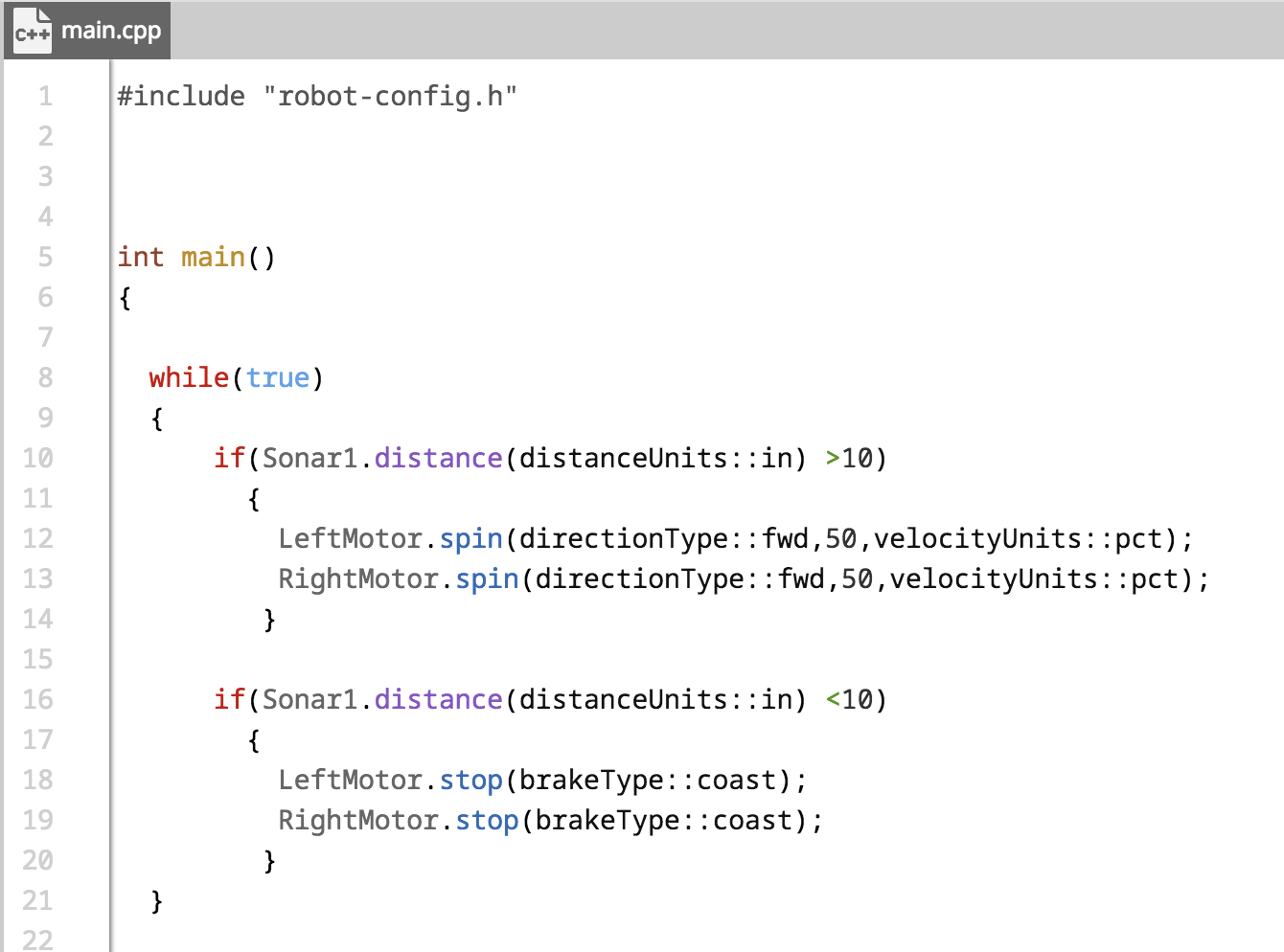
Vex sonar sensor code.
The sensor can be used to detect objects between 2 and 800 centimeters with a resolution of 1 centimeter.
Avoid obstacles and measure distances with the ultrasonic range finder.
Urm37 v3 2 ultrasonic sensor in this tutorial you will find the information to connect the ultrasonic sensor to the arduino board or an arduino clone.
Also there is the code for reading the sensor values and returning the detected.
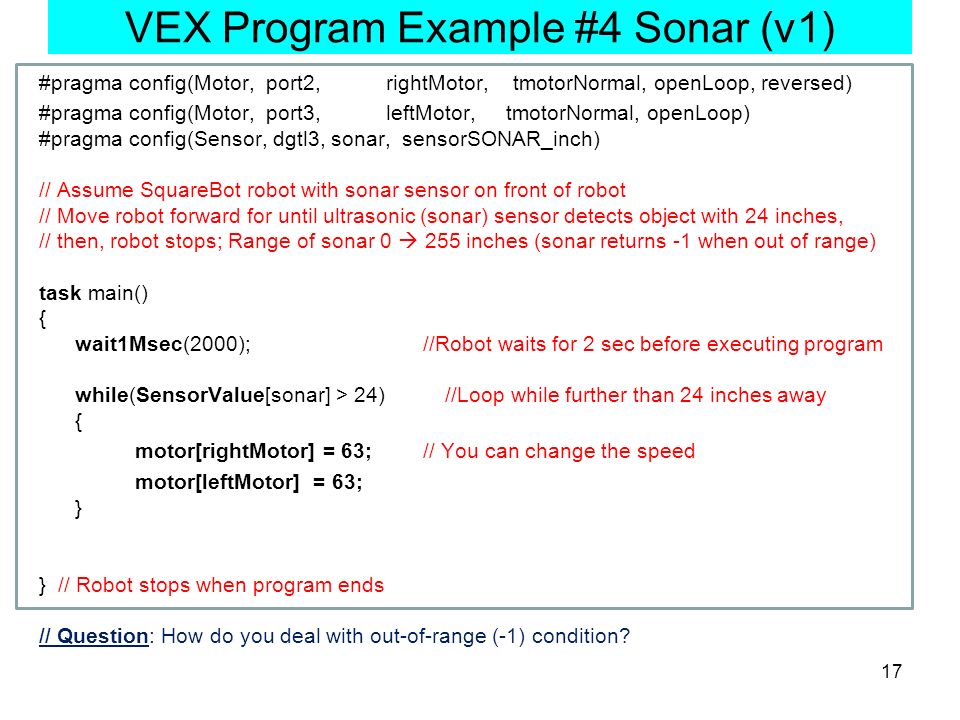
Otherwise it will never break out of the while loop when autonomous starts.
Device emits a high frequency sound wave that alerts the robot to things in its path.
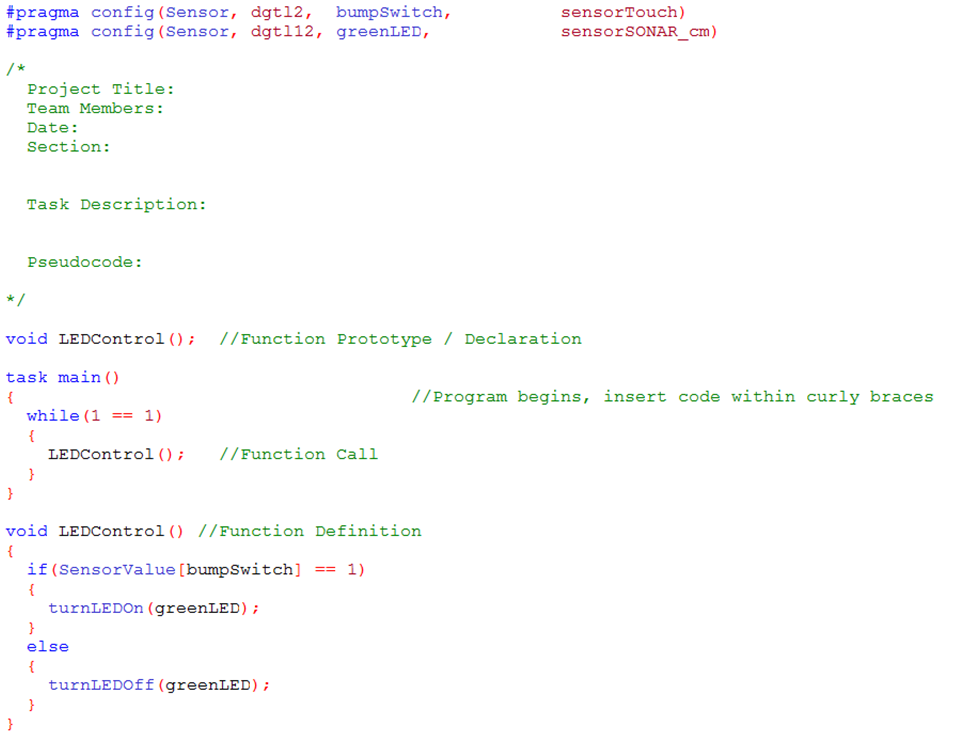
In the pre autonomous section of the code robotc.
Configure the second port to int1 when you select sonar as the sensor type a column for the second port appears for this sensor.
Set the sensor type to sonar set the type of the sensor to sonar another name for the ultrasonic rangefinder because it uses sonar sound waves to measure distance.
Measure distances from 1 5in to 115in detect obstacles using high frequency sound waves create more autonomous function.
A heading an amount of rotation a rate of.
It can detect objects at a range of up to 255 inches approximately 647 centimeters but this range can be limited in certain environments.
This sensor is most often used in obstacle detection.
The inertial sensor needs to be paired with a programming language such as the vexcode v5 or vexcode pro v5 to create a user program for the v5 brain to utilize the sensor s readings to control the robot s behavior.
The v5 brain in concert with a user program can be used to convert the inertial sensor readings into many measurements including.
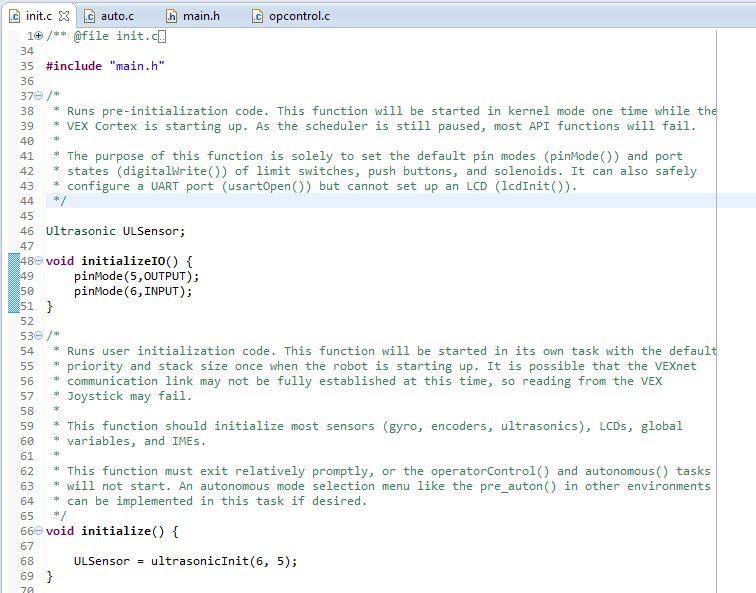
The initialize tab for easyc users we added a few lines of code to say while the robot is disabled put the ultrasonic sensor value to the lcd screen the if the robot is disabled part is critical.
These are just a few of the many fields students can explore by creating with vex robotics technology.
Beyond science and engineering principles a vex robotics project encourages teamwork leadership and problem.
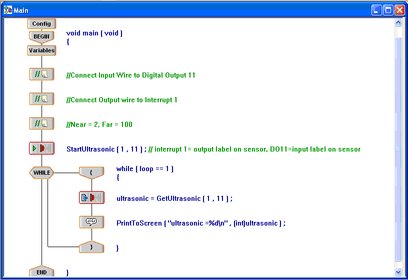
1 declare a variable that will store the data received by the sensor number of inches 2 call the startultrasonic x y function once only x interrupt port y digital output port 3 include variable getultrasonic x y in a loop in order to poll for values similar to using a.
Programming the ultrasonic sensor 4 steps must be taken to use the sensor.